

 حجاب زنان روس در حرم امام علی(ع)")
 متن و حاشیه مراسم ترحیم مادر حمید استیلی")

فرارو- محققان گروه رباتیک دانشگاه کالیفرنیا برکلی، دانشگاه سایمون فریزر و موسسه فناوری جورجیا به تازگی با طراحی نوعی مدل یادگیری جدید، توانسته اند نقش دروازه بانی را به یک ربات چهارپا بسپارند.
به گزارش فرارو به نقل از rahnamato، مدل معرفی شده که در مقالهای در وب سایت مقالات علمی arXiv منتشر شده است، به گونهای طراحی شده است که میتواند مهارتهای ربات را در طول زمان و از طریق یک فرآیند آزمون و خطا بهبود ببخشد. محققانی که این مطالعه را انجام داده اند، میگویند: «دروازه بانی یک کار جالب، اما چالش برانگیز است.
این مسئولیت به رباتی نیاز دارد که بتواند در مقابل توپی که به سرعت حرکت میکند، واکنش نشان داده و با استفاده از مانورهای پویا در مدت زمان بسیار کوتاه (حدود یک ثانیه) آن را ردیابی کند.»
هدف اصلی این تیم طراحی رباتی بود که بتواند مانند یک دروازه بان انسانی، مهارتهای خود را در حین بازی کامل کند. آنها برای این کار یک مدل یادگیری تقویتی ایجاد کردند که میتوانست ربات را از طریق یک فرآیند آزمون و خطا آموزش دهد، نه از طریق استراتژیهای ثابت و مهندسی شده توسط انسان.
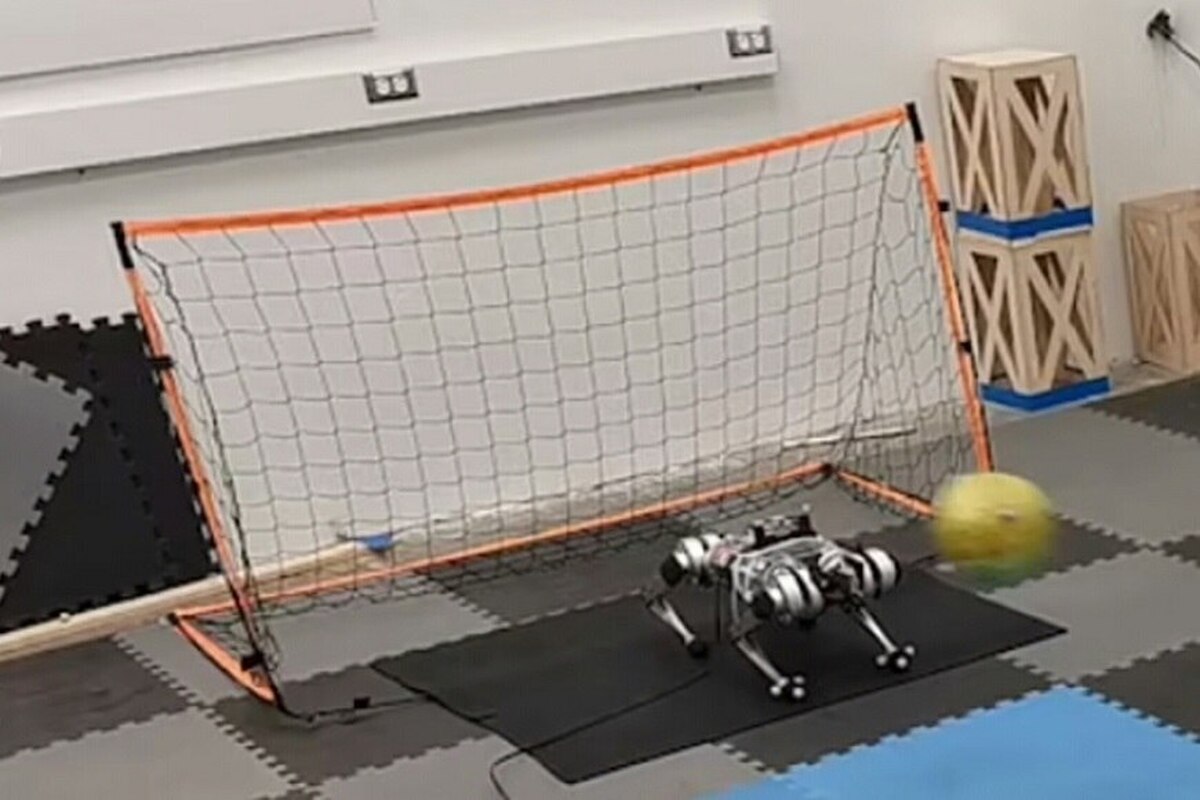
محققان مدل یادگیری تقویتی خود را به مجموعهای از شبیه سازیهای بازی فوتبال آموزش دادند. آنها این مدل را بر روی Mini Cheetah، یک ربات چهارپا که در موسسه فناوری ماساچوست (MIT) توسعه یافته بود، به کار گرفته و عملکرد آن را در دنیای واقعی مورد آزمایش قرار دادند.
چارچوب یادگیری تقویتی ایجاد شده توسط هوانگ و همکارانش، تواناییهای ربات Mini Cheetah را بهعنوان دروازهبان فوتبال تا حد زیادی بهبود میبخشد. این ربات توانست ۸۷.۵ درصد از ضربات پرتاب شده به سمت دروازه را مهار کند.
مدل طراحی شده توسط این تیم، در آینده میتواند به منظور بهبود عملکرد رباتهایی که برای شرکت در مسابقات روبوکاپ و سایر مسابقات فوتبال رباتیک طراحی میشوند، مورد استفاده قرار گیرد.
این مدل همچنین میتواند برای بهبود چابکی و تواناییهای فیزیکی رباتهای چهارپا که برای انجام وظایفی مانند مأموریتهای جستجو و نجات، طراحی شدهاند، مورد استفاده قرار گیرند. محققان امیدوارند که بتوانند در آینده نزدیک رباتهای چهارپا را قادر به رقابت با بازیکنان فوتبال انسانی نمایند.

 به این ۹عادت روزمره بله بگویید تا پختهتر شوید
به این ۹عادت روزمره بله بگویید تا پختهتر شوید  چطور مینیمالیسم را به بخشی از سبک زندگی خود تبدیل کنیم؟
چطور مینیمالیسم را به بخشی از سبک زندگی خود تبدیل کنیم؟  ۱۰ فیلم برتر فلورنس پیو / بازیگر جذاب فیلم اوپنهایمر + بیوگرافی و حواشی زندگی
۱۰ فیلم برتر فلورنس پیو / بازیگر جذاب فیلم اوپنهایمر + بیوگرافی و حواشی زندگی  ۱۰نگرانی بیمورد که بعدها میفهمید ارزشش را نداشت!
۱۰نگرانی بیمورد که بعدها میفهمید ارزشش را نداشت!  زیباترین گیاهان اپارتمانی برای آویزان کردن از سقف
زیباترین گیاهان اپارتمانی برای آویزان کردن از سقف  ۷دردسر داشتن هوش بالا
۷دردسر داشتن هوش بالا 








")